
系统平台
Hardiman
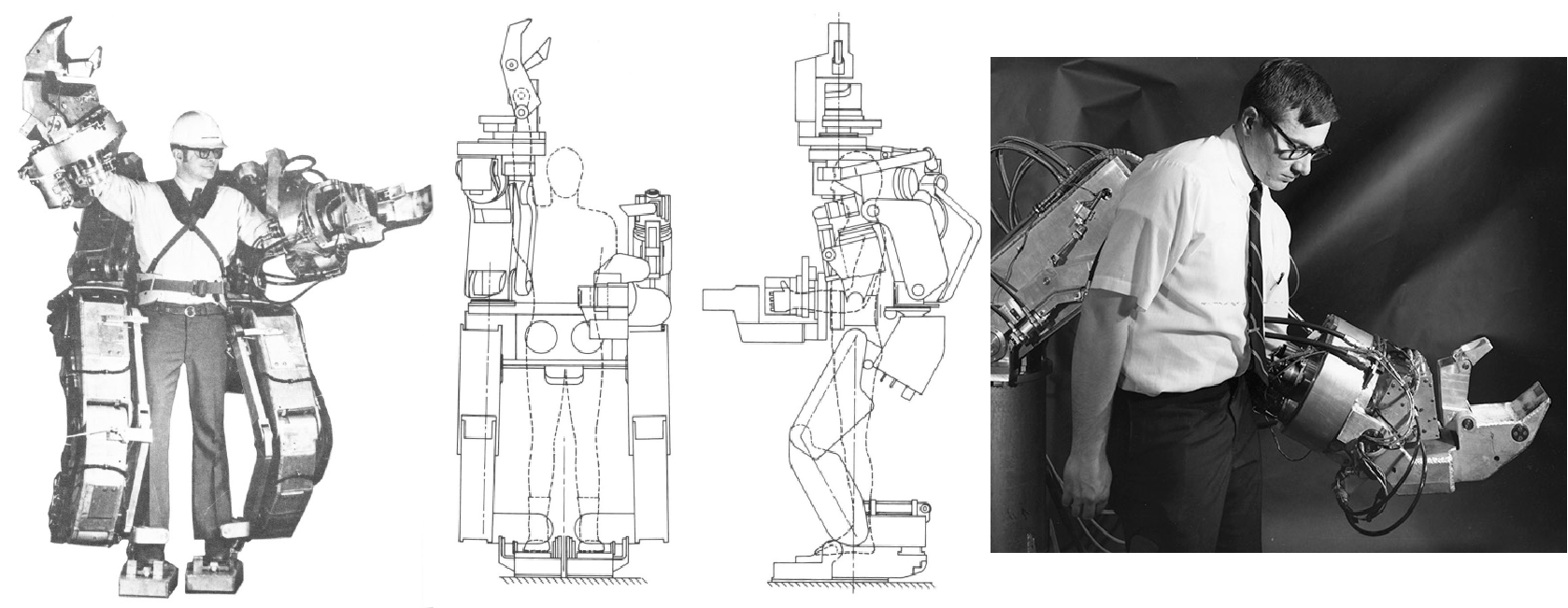
- Handyman to Hardiman
- Hardiman - Wikipedia
- 1965-71 - G.E. Hardiman I Exoskeleton - Ralph Mosher (American) - cyberneticzoo.com
EHPA - DARPA
- Exoskeletons for Human Performance Augmentation (EHPA) A Program Summary.pdf
- Exoskeletons for Human Performance Augmentation (oocities.org)
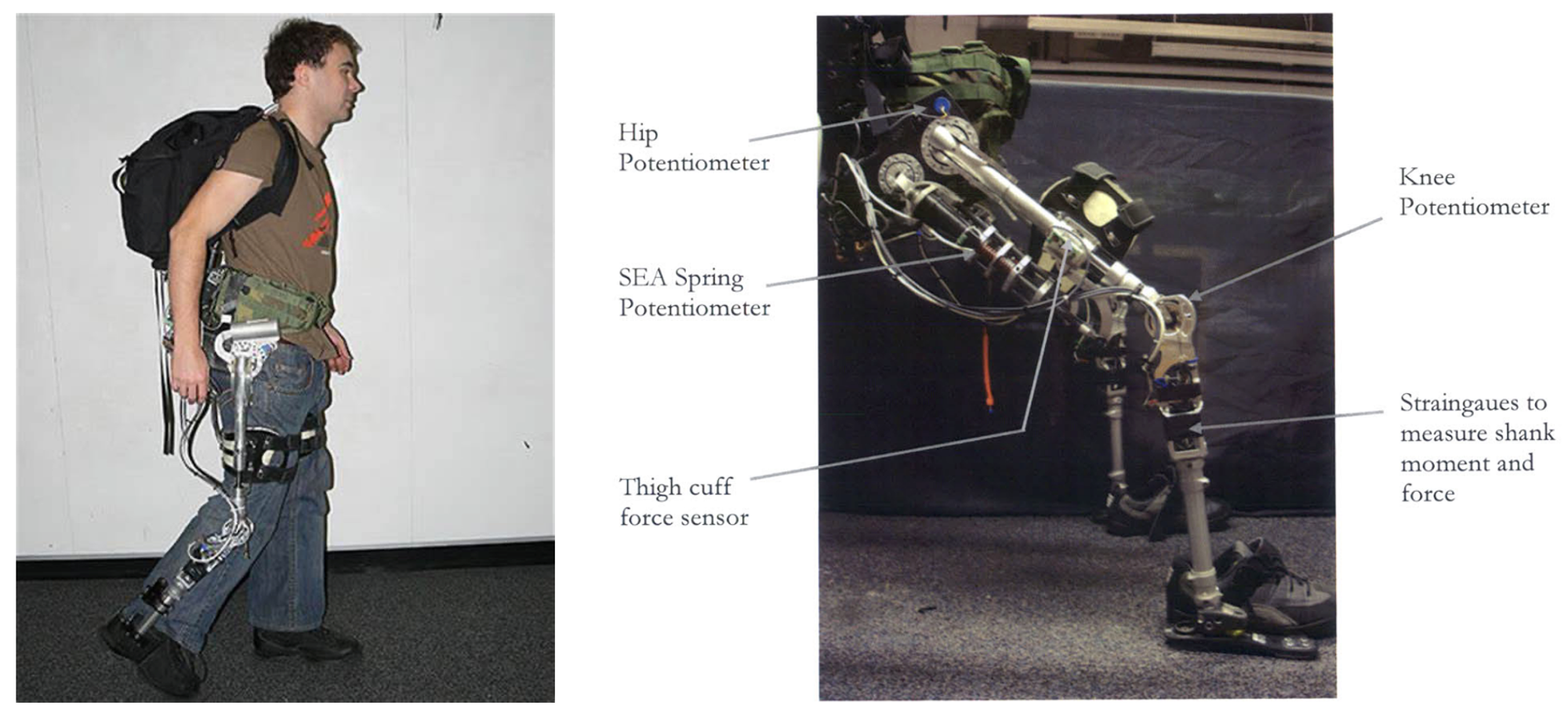
BLEEX

系统设计
- The Berkeley Lower Extremity Exoskeleton
- Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX) [TMECH]
- On the mechanical design of the Berkeley Lower Extremity Exoskeleton (BLEEX) [IROS].pdf)
- Design of an electrically actuated lower extremity exoskeleton
控制算法
- That Which Does Not Stabilize, Will Only Make Us Stronger [IJRR]
- On the Control of the Berkeley Lower Extremity Exoskeleton (BLEEX) [ICRA].pdf)
- Hybrid Control of the Berkeley Lower Extremity Exoskeleton (BLEEX) [IJRR].pdf)
- Control scheme and networked control architecture for the Berkeley lower extremity exoskeleton (BLEEX) [ICRA]
- System identification for the Berkeley lower extremity exoskeleton (BLEEX) [ICRA]
- Control and system identification for the Berkeley lower extremity exoskeleton (BLEEX)
其他资源
Army Exoskeleton
- Human Universal Load Carrier (HULC) - Army Technology
- Raytheon XOS 2 Exoskeleton, Second-Generation Robotics Suit - Army Technology
MIT-Exoskeleton
- An autonomous, underactuated exoskeleton for load-carrying augmentation
- Development of a lightweight, underactuated exoskeleton for load-carrying augmentation
- A quasi-passive leg exoskeleton for load-carrying augmentation
- Biomimetic design for an under-actuated leg exoskeleton for load-carrying augmentation
HAL

- Predictive control estimating operator’s intention for stepping-up motion by exo-skeleton type power assist system HAL
- Power Assist System HAL-3 for Gait Disorder Person
- Comfortable power assist control method for walking aid by HAL-3
- Power assist control for walking aid with HAL-3 based on EMG and impedance adjustment around knee joint
- Power assist method for HAL-3 estimating operator’s intention based on motion information
Power assist method for HAL-3 using EMG-based feedback controller
Intention-based walking support for paraplegia patients with Robot Suit HAL
- HAL: Hybrid Assistive Limb Based on Cybernics
- CYBERDYNE株式会社
- HAL演示视频 - YouTube
Dynamic Walking

- Kuo - 2007 - The six determinants of gait and the inverted pend.pdf
- Kuo 和 Donelan - 2010 - Dynamic Principles of Gait and Their Clinical Impl.pdf
- Kuo 等 - 2005 - Energetic Consequences of Walking Like an Inverted.pdf
- Maxwell Donelan 等 - 2001 - Mechanical and metabolic determinants of the prefe.pdf
- Kuo - 2002 - Energetics of Actively Powered Locomotion Using th.pdf
- Kuo - 2001 - A Simple Model of Bipedal Walking Predicts the Pre.pdf
- Donelan 等 - 2004 - Mechanical and metabolic requirements for active l.pdf
- Bauby 和 Kuo - 2000 - Active control of lateral balance in human walking.pdf
- Collins - Dynamic Walking Principles Applied to Human Gait.pdf
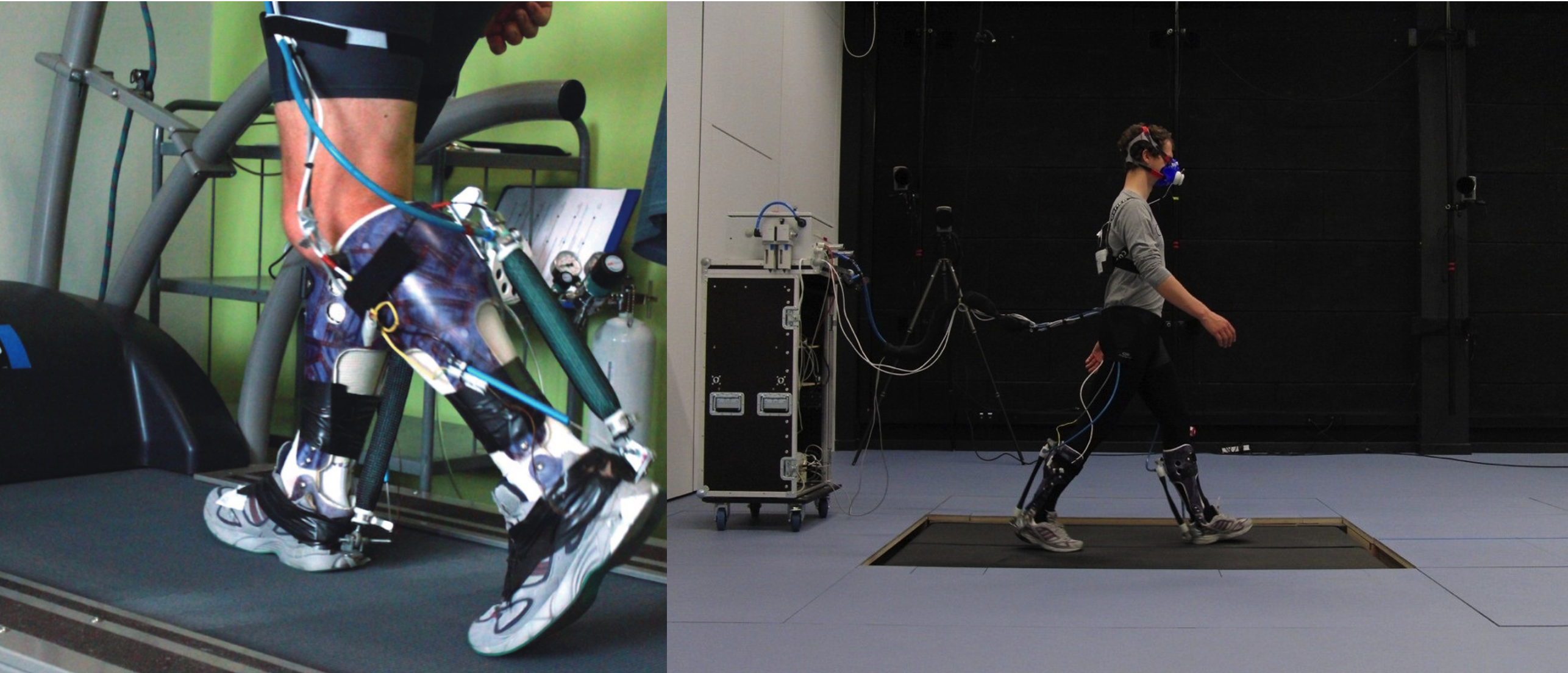
Powered Ankle-Foot Orthosis - UMICH

结构与控制
- Ferris 等 - 2005 - An Ankle-Foot Orthosis Powered by Artificial Pneum.pdf
- Ferris et al_2006_An improved powered ankle–foot orthosis using proportional myoelectric control.pdf
- Gordon 等 - 2006 - Mechanical performance of artificial pneumatic mus.pdf
- Kinnaird 和 Ferris - 2009 - Medial Gastrocnemius Myoelectric Control of a Robo.pdf
- Koller et al_2015_Learning to walk with an adaptive gain proportional myoelectric controller for.pdf
生理学研究
- Ferris 等 - 2005 - Powered Lower Limb Orthoses for Gait Rehabilitatio.pdf
- Sawicki 等 - 2005 - Powered Lower Limb Orthoses Applications in Motor.pdf
- Sawicki 等 - 2006 - The effects of powered ankle-foot orthoses on join.pdf
- Cain 等 - 2007 - Locomotor adaptation to a powered ankle-foot ortho.pdf
Gordon 和 Ferris - 2007 - Learning to walk with a robotic ankle exoskeleton.pdf
- Sawicki_Ferris_2009_Mechanics and energetics of incline walking with robotic ankle exoskeletons.pdf
- Sawicki 和 Ferris - 2009 - Powered ankle exoskeletons reveal the metabolic co.pdf
WALL-X - Ghent University
- Malcolm et al_2013_A Simple Exoskeleton That Assists Plantarflexion Can Reduce the Metabolic Cost.pdf
- Galle et al_2017_Reducing the metabolic cost of walking with an ankle exoskeleton.pdf
MIT Autonomous Ankle Exoskeleton

- Mooney et al_2014_Autonomous exoskeleton reduces metabolic cost of human walking during load.pdf
- Mooney et al_2014_Autonomous exoskeleton reduces metabolic cost of human walking.pdf
- Mooney_Herr_2016_Biomechanical walking mechanisms underlying the metabolic reduction caused by.pdf
Harvard Soft Exosuit

Stanford Exoskeleton Emulators
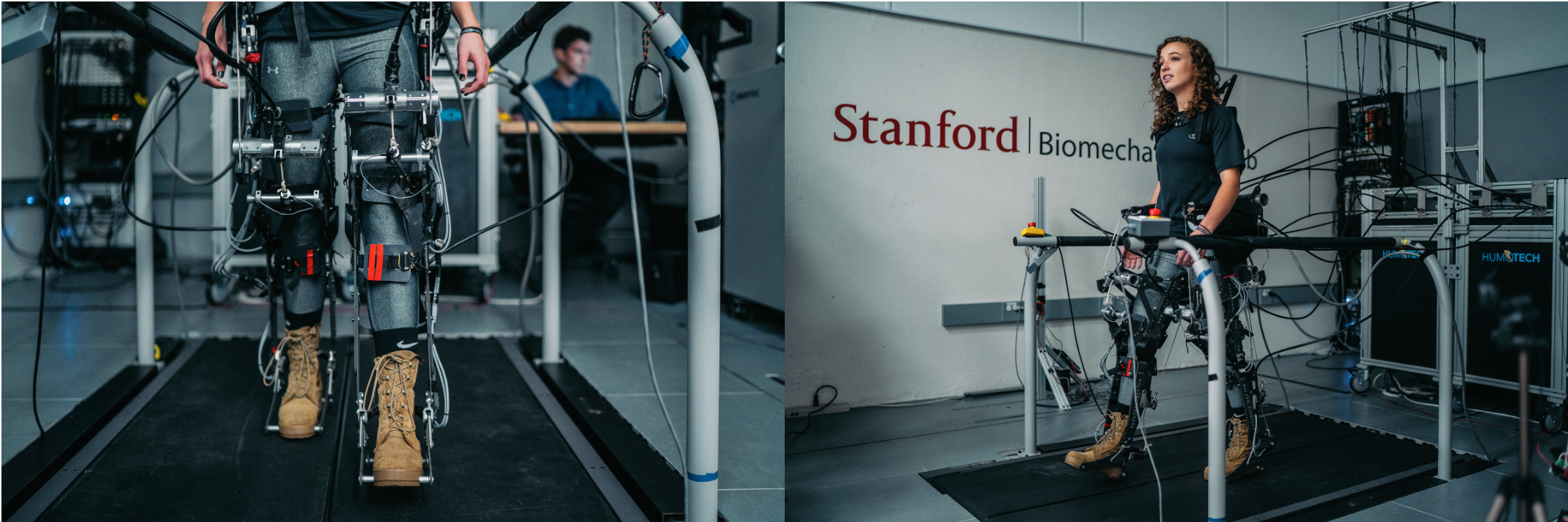
前沿研究
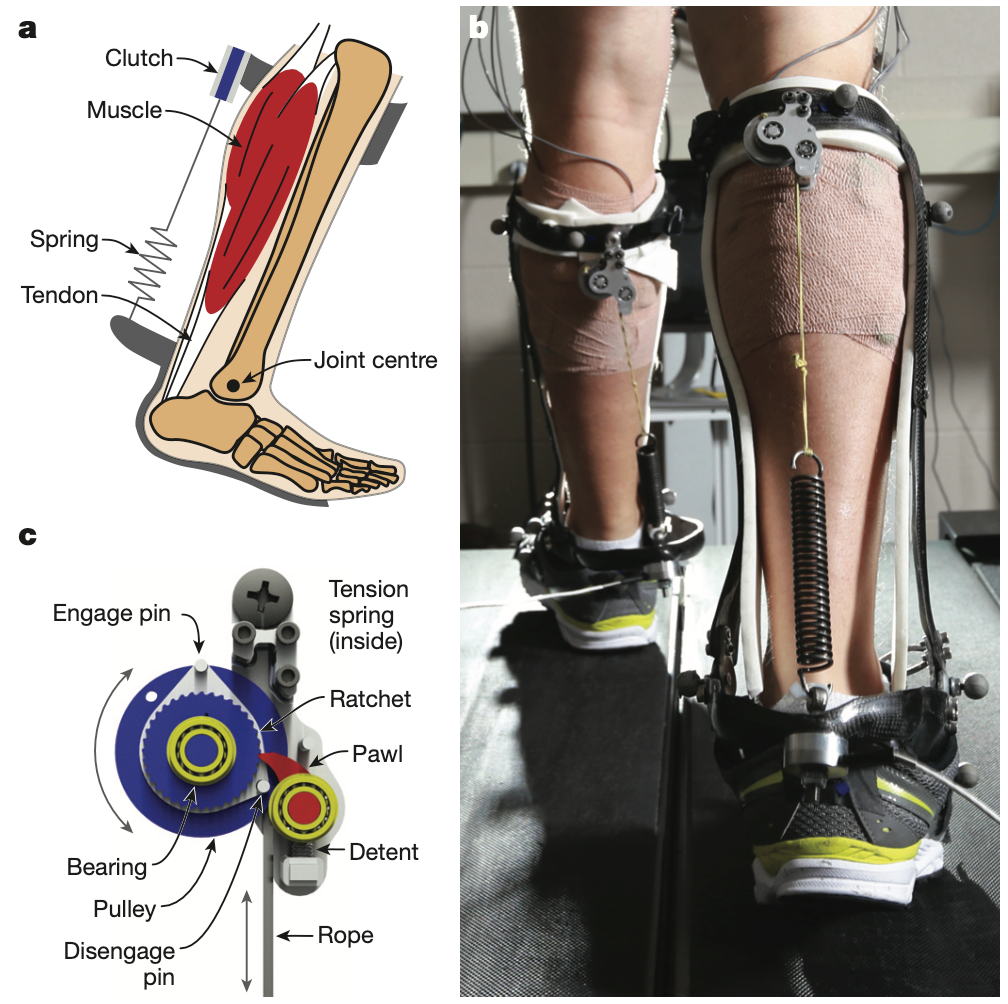
2015 Nature
2017 Science

2019 Science

- Reducing the metabolic rate of walking and running with a versatile, portable exosuit
- Supplementary Materials
2018 Science Robotics
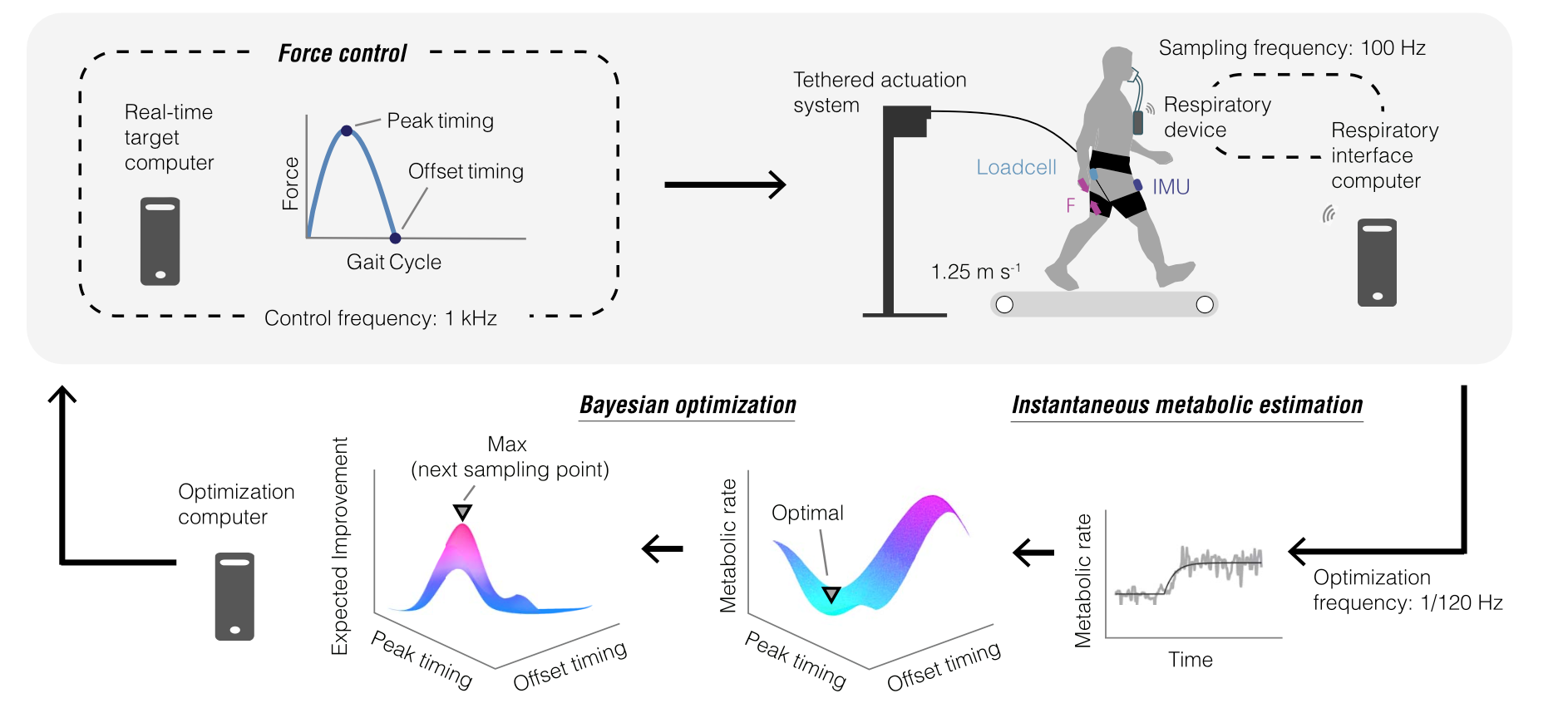
- Human-in-the-loop optimization of hip assistance with a soft exosuit during walking
- Supplementary Materials
重要人物
Kazerooni
 | 加利福尼亚大学伯克利分校机械工程教授 伯克利机器人与人类工程实验室主任 BLEEX下肢外骨骼系统团队领导人 Ekso Bionics、suitX公司创始人 [个人主页] Homayoon Kazerooni - UC Berkeley Mechanical Engineering [实验室网站] Robotics & Human Engineering Laboratory (berkeley.edu) |
|---|---|
Yoshiyuki Sankai
.jpeg) | 日本筑波大学(University of Tsukuba)教授 日本筑波大学半机械人研究中心(Center for Cybernics)主任 日本内阁府战略创新推进计划项目主任 CYBERDYNE株式会社社长 日本富豪榜排名40(2018年) [个人主页] TRIOS 研究人员信息 [公司官网] CYBERDYNE株式会社 [维基百科] Yoshiyuki Sankai [谷歌学术] yoshiyuki sankai |
|---|---|
Hugh Herr
 | 麻省理工学院媒体实验室(MIT Media Lab)教授 MIT杨氏仿生学中心(Yang Center for Bionics)共同主任 [个人主页] Hugh Herr — MIT Media Lab [实验室网站] Biomechatronics — MIT Media Lab |
|---|---|
Arthur Kuo
 | 前密歇根大学机械工程系教授 前密歇根人体生物力学与控制实验室主任 加拿大卡尔加里大学(University of Calgary)教授 人体性能实验室(Human Performance Lab)主任 加拿大神经肌肉骨骼与生物力学研究主席 Dynamic Walking领域的权威专家 [个人主页] Arthur Kuo - University of Calgary [谷歌学术] Art Kuo |
|---|---|
Daniel Ferris
 | 佛罗里达大学(University of Florida)生物医学工程系教授 人体神经力学实验室(Human Neuromechanics Laboratory)主任 TNSRE期刊主编(2018-2020) [个人主页] Daniel Ferris – University of Florida [实验室网站] Research – Human Neuromechanics Laboratory [谷歌学术] Daniel P. Ferris |
|---|---|
Gregory Sawicki
 | 佐治亚理工学院(Georgia Tech)机械工程系副教授 可穿戴机器人生理学实验室(Physiology of Wearable Robotics Lab)负责人 [个人主页] Gregory_Sawicki (gatech.edu) [实验室网站] Home - Physiology of Wearable Robotics Lab (gatech.edu) |
|---|---|
Philippe Malcolm
 | 内布拉斯加州大学奥马哈分校(University of Nebraska Omaha)助理教授 [个人主页] Philippe Malcolm (unomaha.edu) [谷歌学术] Philippe Malcolm |
|---|---|
Conor Walsh
 | 哈佛大学工程与应用科学学院教授 哈佛大学Wyss生物启发工程学院副教授 哈佛生物设计实验室(Harvard Biodesign Lab)创始人 [个人主页] Conor Walsh, Ph.D. (harvard.edu) [实验室网站] Soft Exosuits - Harvard Biodesign Lab |
|---|---|
Steve Collins
.jpeg) | 斯坦福大学机械工程学副教授 斯坦福大学生物工程学副教授 斯坦福大学生物机电实验室主任 Science Robotics编委会成员 [个人主页] Steve Collins - Biomechatronics Laboratory (stanford.edu) [实验室网站] Biomechatronics Laboratory (stanford.edu) |
|---|---|