前面我们讨论的所有系统均为线性系统,线性系统的分析和设计方法已经相当成熟和完善。但实际物理世界中的完美线性系统几乎不存在,摩擦、迟滞、饱和等各种非线性特性是几乎无法避免的,也因此发展出了一套非线性系统的分析和控制的方法。本小节简单介绍非线性控制中的反馈线性化、自适应控制和滑模控制等方法。

考虑在电机输出轴安装一个悬臂负载,则系统的动力学模型如下:
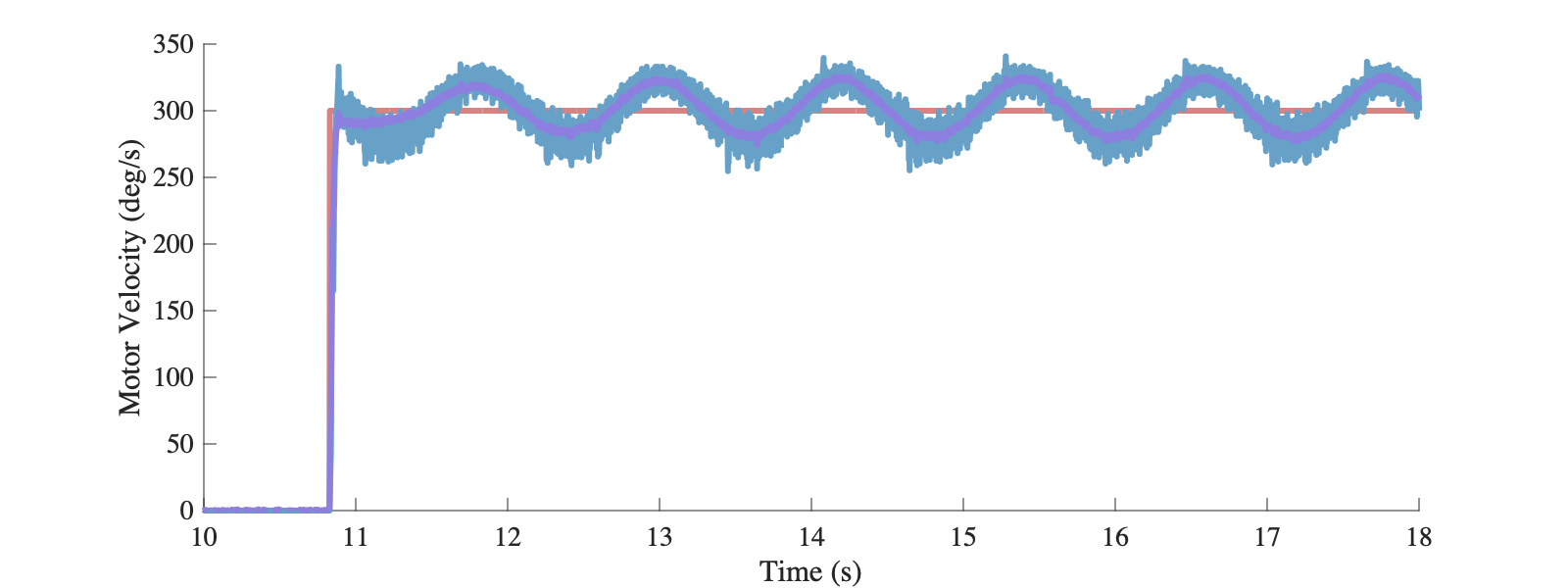
可以看出此时系统存在一个非线性项$K_g\sin(\theta)$。此时若采用前面设计的PI控制器进行速度控制,则系统会由于非线性项的影响而存在周期性的波动:
反馈线性化
对于结构明确、参数已知的非线性系统,一个很自然的想法就是通过适当的变换,将系统非线性部分消除掉,再对变换后的线性系统采用经典控制或现代控制的方法设计控制器。例如考虑构建新的控制量$i_u$:
则变换后系统的模型为:
根据前面的分析,对于变换后的线性系统我们设计PI控制器:
则总的电机控制电流为:
这里我们实现最简单的反馈线性化形式,对于更复杂的非线性系统有着更系统的反馈线性化理论。
我们实际上是通过驱动电流补偿负载转矩,来消除系统的非线性项,从而修改了系统模型。前面我们介绍过测速反馈也是一种修改模型的方法,和这里的反馈线性化是相似的思想。实际上仅通过上面的反馈线性化部分,就可以实现负载的重力补偿:
自适应控制
在上面的反馈线性化中,系统的非线性结构和参数是完全已知。但在实际系统中,我们可能无法预先知道参数的大小,甚至是非线性的结构。对非线性结构已知、参数未知的情况,可以通过辨识非线性参数,进而通过反馈线性化实现稳定控制,由此发展了模型参考自适应控制和自校正控制,这里我们 介绍前一种方法。
考虑动力学模型:
其中$K_g$为恒定或缓慢变化的未知参数,为简化后面的表达,所有参数对$K_m$归一化。
由于$K_g$未知,因此对构造一个估计变量$\hat K_g$,估计误差为:
考虑对于期望转速$w_d$的跟踪问题,跟踪误差为:
设计如下控制器和参数估计器:
则有:
构造李雅普诺夫函数:
因此自适应系统是全局稳定的,Barbalat引理保证跟踪误差全局渐进收敛。
在具体实现代码实现时,阶跃曲线的$\dot w_d=0$,$i_a=\frac{1}{K_i}(K_fw-\hat K_g\sin\theta+ke)$,其中$(K_fw-\hat K_g\sin\theta)$是通过估计参数进行反馈线性化,$ke$是比例控制。我们也可以根据设计成其他形式的自适应控制器,例如采取比例积分方法:
其中$K_g^{‘}=\frac{K_g}{K_i}$。dSAPCE的代码如下:
1 | e = des_vel - motor_vel; |
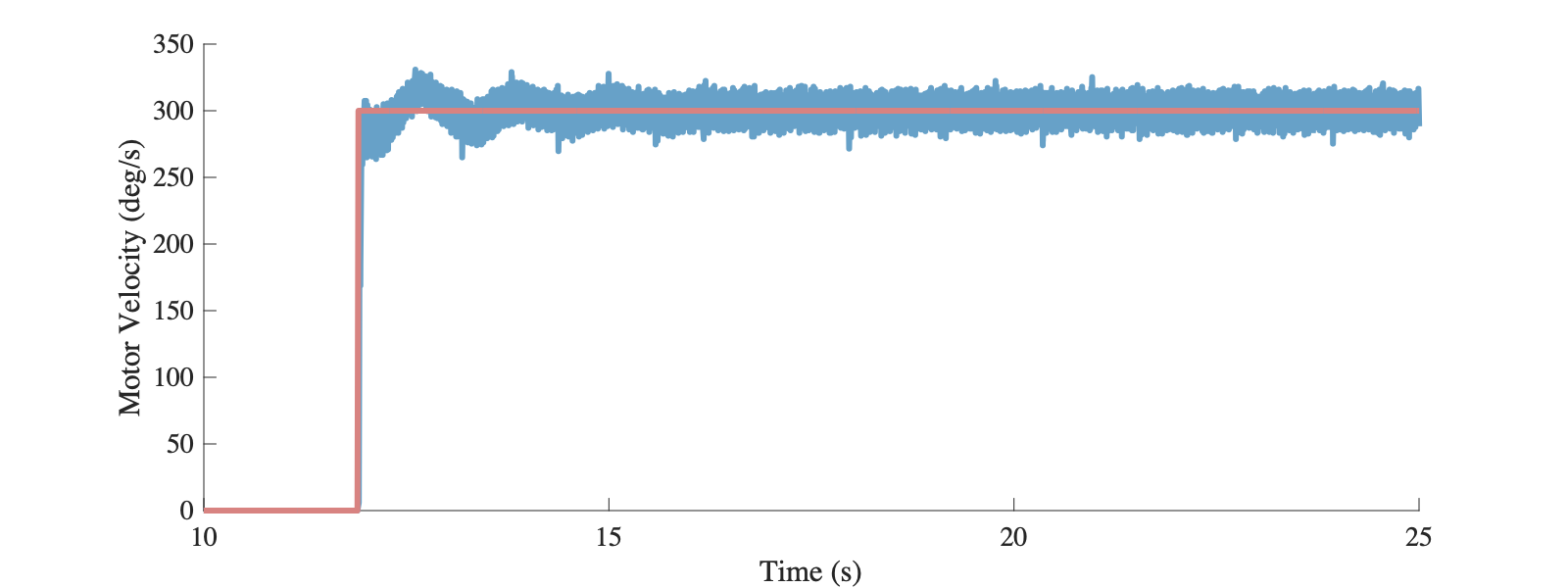
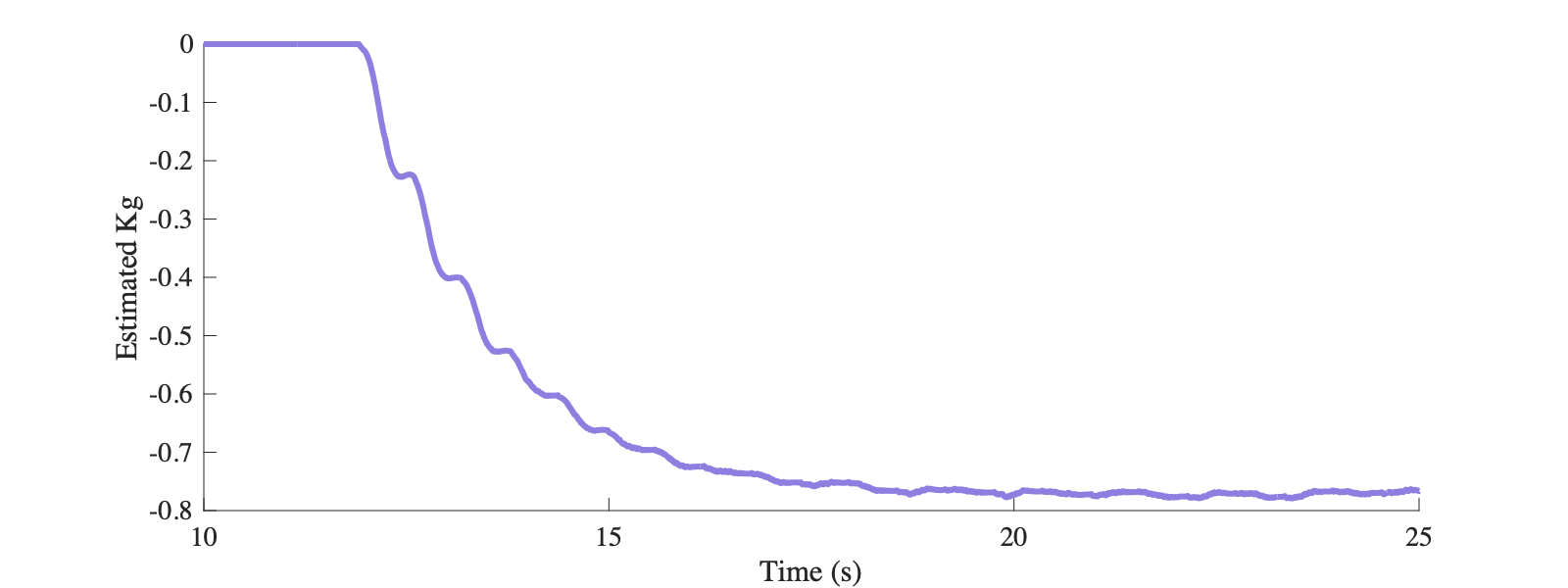
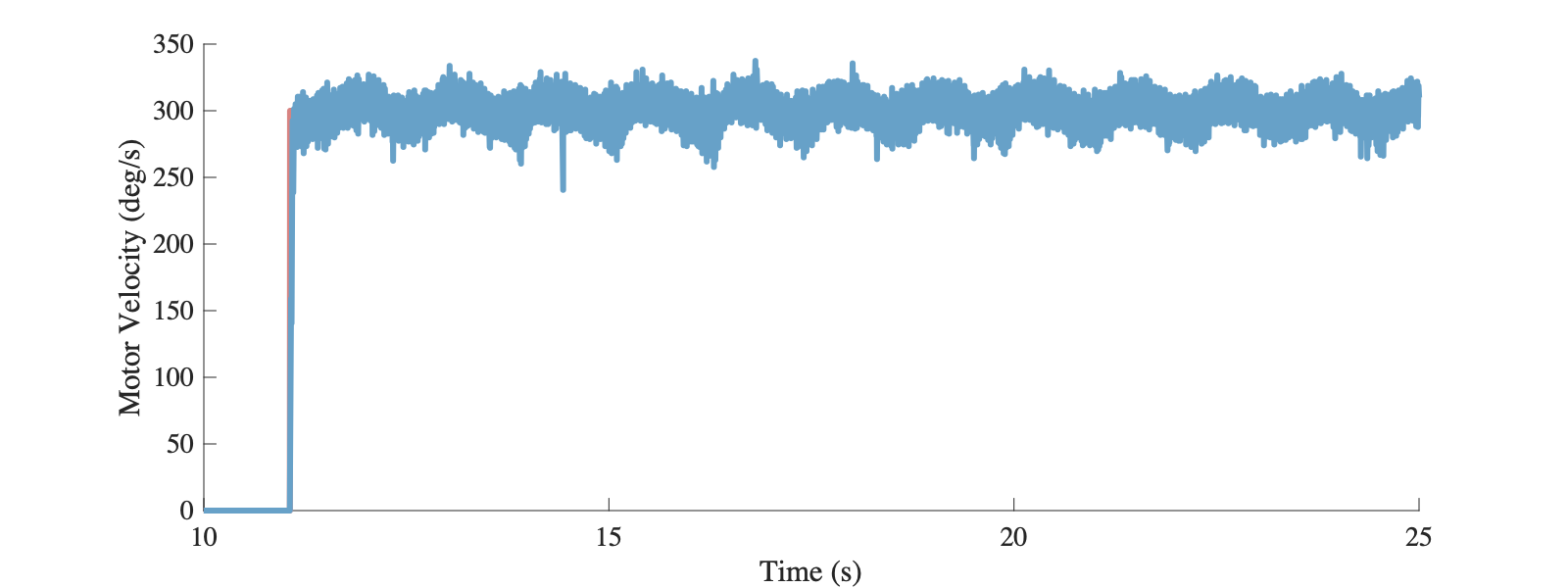
从实验结果可以看出,随着自适应学习过程的推进,参数估计逐渐准确,非线性的影响逐渐被抵消。
滑模控制
滑模控制是另一种处理非线性系统模型不确定的方法,它考虑系统的参数快速变化、或是模型结构未知的情况,但所有的不确定项存在一个上确界函数。例如:
同样考虑跟踪期望转速$w_d$问题,跟踪误差为:
设计控制器:
则有:
构造李雅普诺夫函数:
由Lyapunov-like Lemma可知系统全局渐进稳定。通过一下代码在dSPACE中实现滑模控制
1 | e = des_vel - motor_vel; |
在具体实现时,滑模控制是通过产生较大的控制输出来将系统强行到期望“滑模面”上,并容易出现抖振现象,电机电流波动震荡较大。