肌肉骨骼模型
骨骼的刚体动力学模型
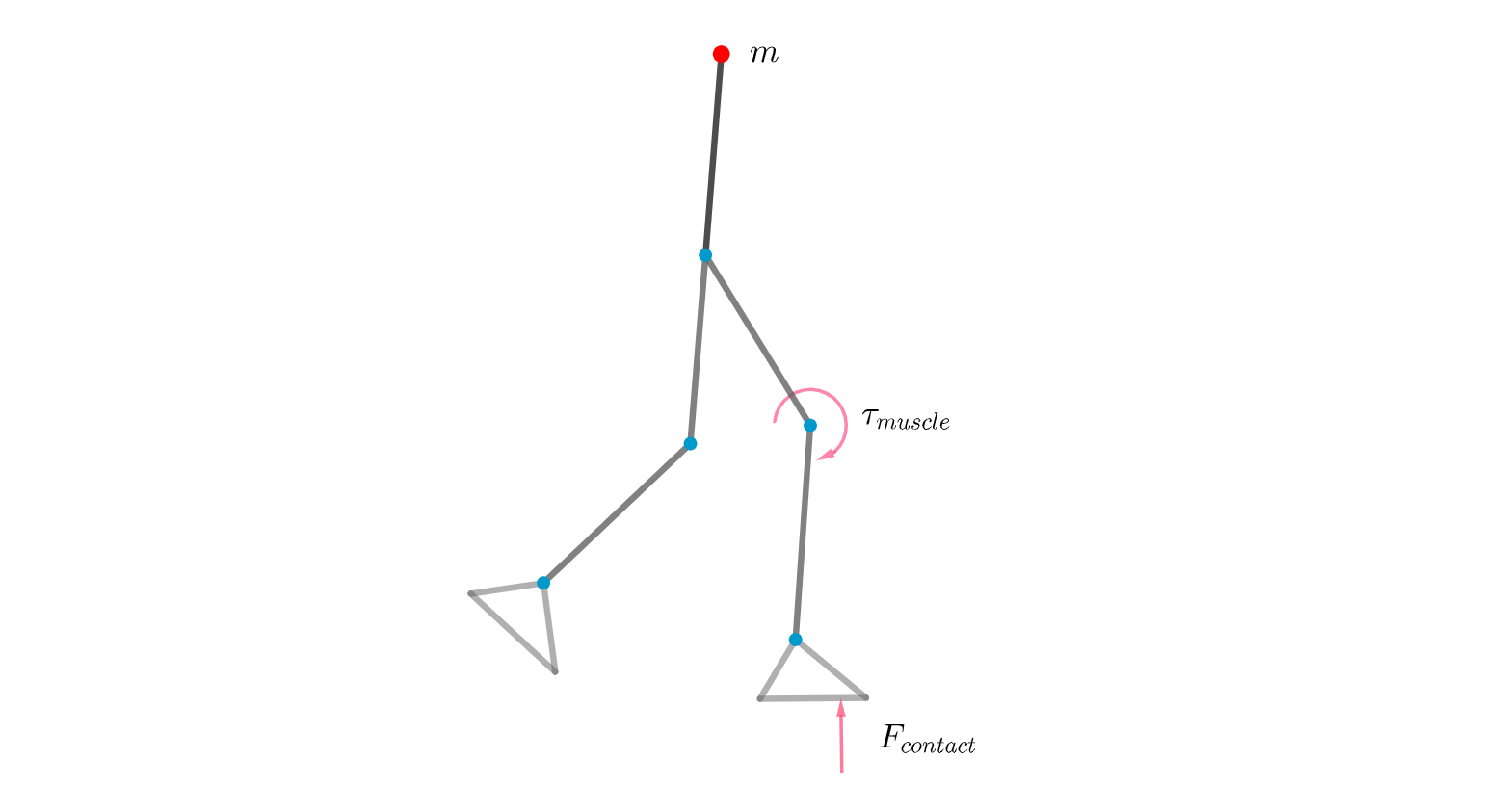
首先基于刚体动力学对于人体骨骼系统进行建模。首先确定系统的广义坐标$q$,对于图中所示的二维模型为例,广义坐标包含躯干的水平、数值方向位移和姿态角,以及每条腿三个关节角,一共$3+2*3=9$个自由度。之后通过这些广义变量和广义变量的导数,表示出系统的动能和势能,并构造拉格朗日函数:
考虑骨骼系统仅收到地反力和肌肉力的作用,通过拉格朗日方程得到系统的动力学模型:
其中$\mathbf{M(q)}$为质量矩阵,$\mathbf{B}(\mathbf{q}, \dot{\mathbf{q}})$包含重力、离心力和科氏力,$\mathbf{J(q)}$表示雅克比矩阵,将地反力转化为对每个广义坐标的等效力矩,$\mathbf{R(q)}$表示肌肉力对广义坐标的等效力矩。下面我们主要讨论等式右侧的肌肉力与地反力。
肌肉动力学
肌肉激活动力学
尽管各个文献里的描述不尽一致,但一般来说excitation用来描述神经信号,是肌肉的控制输入(整流滤波归一化的EMG信号就是这个),而activation用来表示肌肉的活跃度,是肌肉的内部状态。在静态状态下,这两者可能相等,但在动态变化中,两者一般不同,存在由excitation到activation动态过程,即肌肉激活动力学。各方学者建立了不同的激活动力学模型,一般包含一个微分方程和一些非线性变换,其中Winters开发的一种激活动力学如下:
肌肉收缩动力学
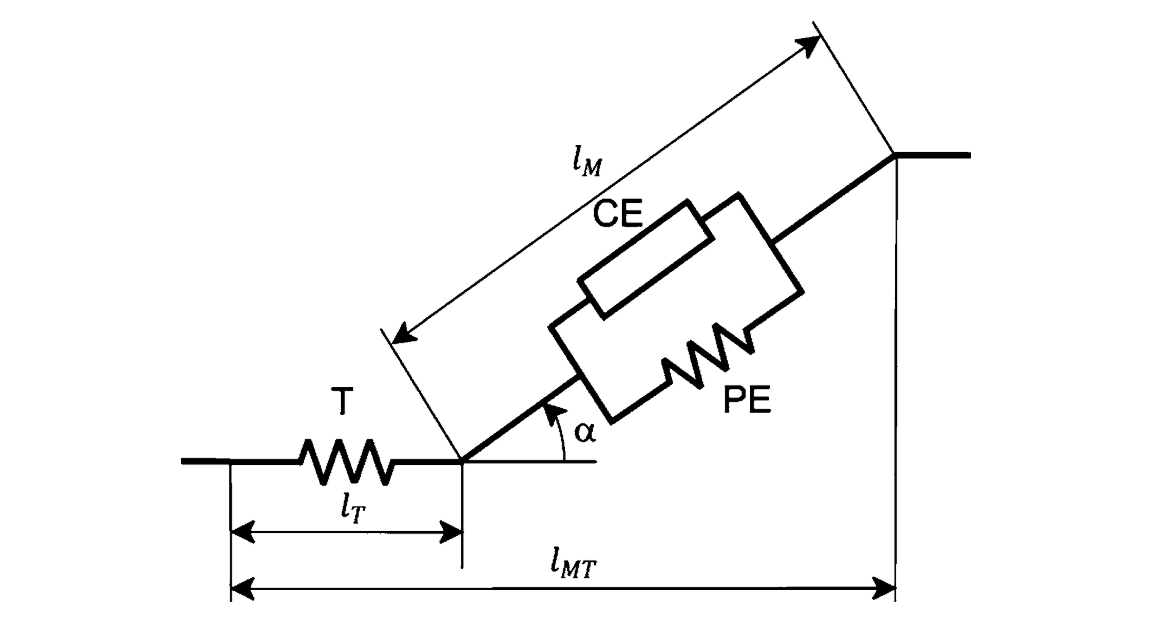
肌肉收缩的特性可以用如上的Hill肌肉模型来描述,它由肌肉收缩单元CE与被动弹性单元PE并联,并与一个肌腱弹性单元T串联,肌肉与肌腱之间还存在一个角度成为羽状角。由于根据上面的模型,肌肉实际产生的力不仅受到收缩单元CE的激活度的影响,还受到肌肉的长度、收缩速度的影响。由肌肉纤维产生的力具有如下关系:
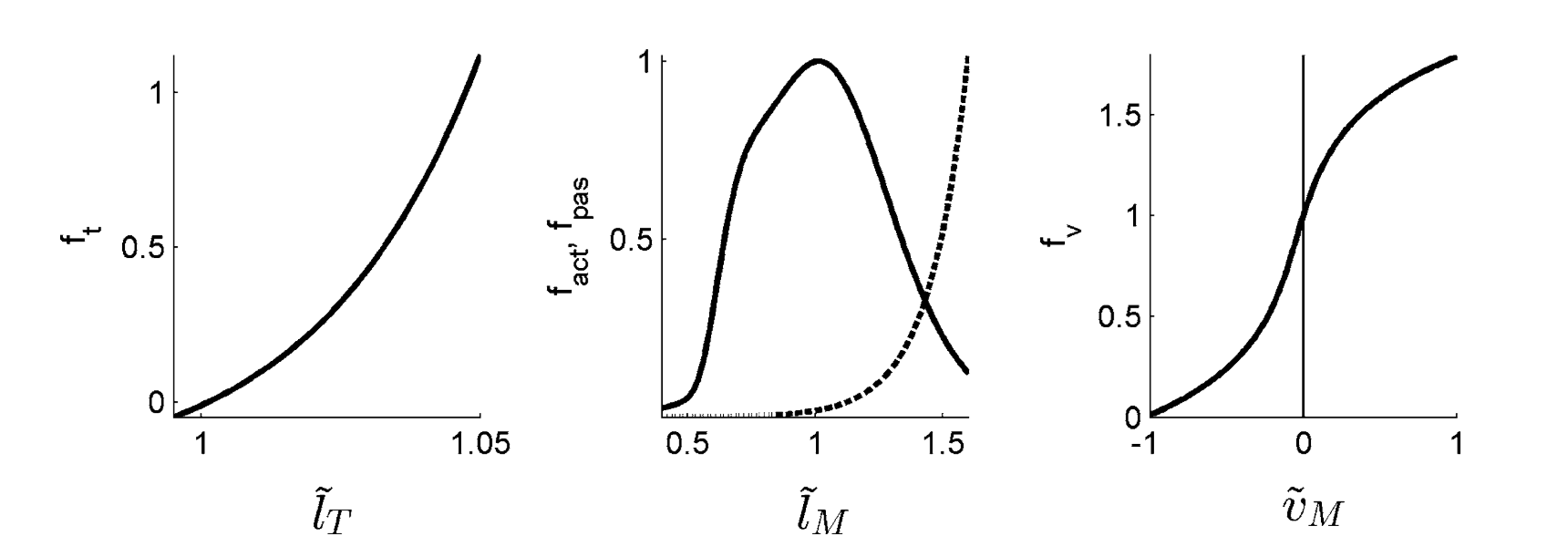
$F^{\max }$表示最大等长收缩力,$f(l),f(v),f(p)$分别表示力-长度、力-速度、被动力-长度的关系。这些函数由下图所示的实验曲线所描述,一般可以通过多项式函数拟合来近似表示。
注意到上式公式中,实际输入为激活度$a$、归一化肌肉长度$l$、和归一化收缩速度$v$,而肌肉长度与收缩速度之间存在关系,收缩动力学的状态量仅有$a$和$l$,且上述方程描述的是一个微分方程。我们将整个肌肉动力学表示为如下形式,但这种表示并不严谨,实际上每块肌肉包含着两个微分方程:
地反力模型
OpenSim中采用Hunt-Crossley模型来表示接触力,接触力由刚度项、阻尼项和摩擦项组合而成,其表达式为:
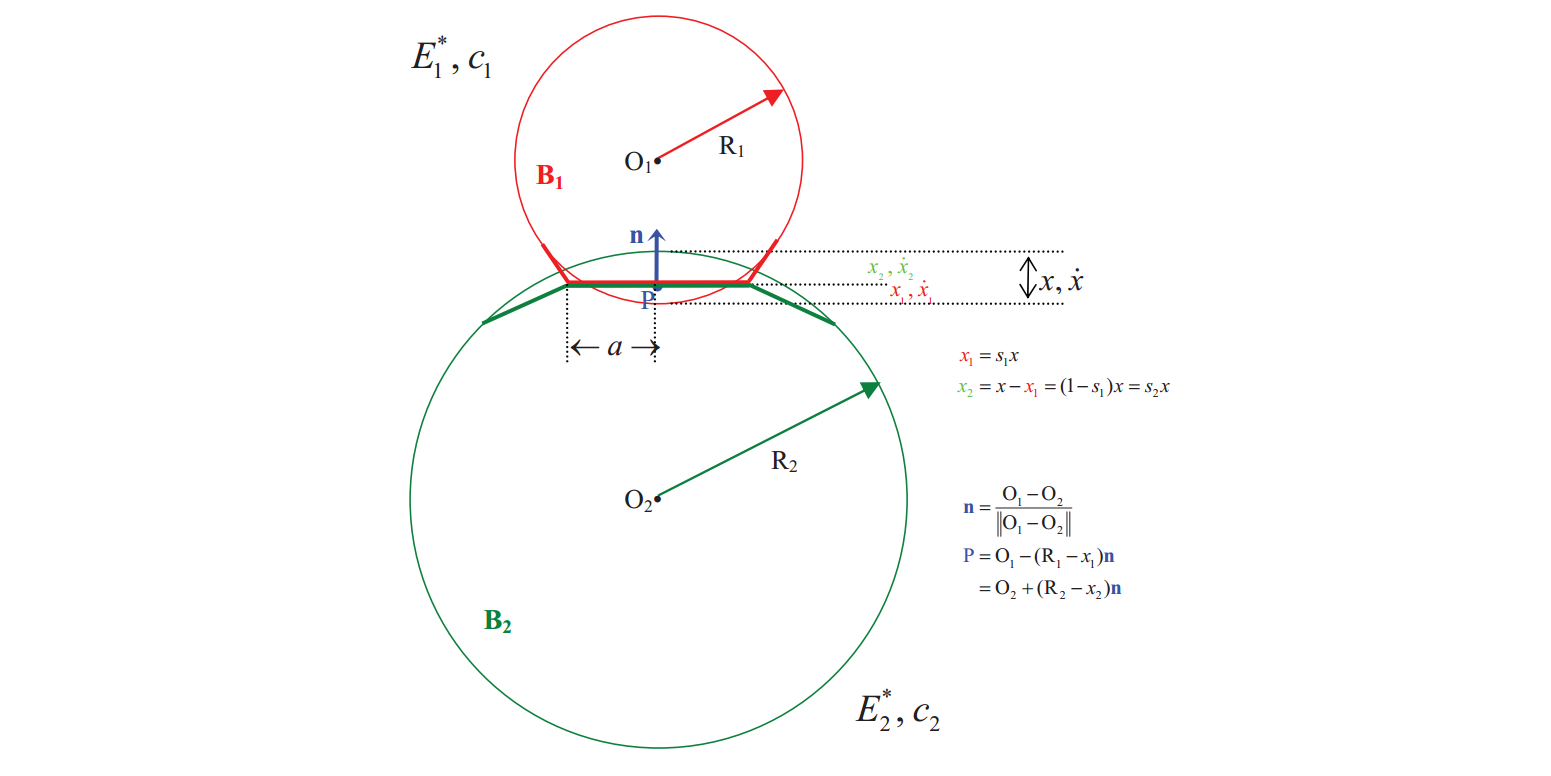
接触力模型中的第一项表示弹性力。如上图所示,我们可以用两个弹性小球来描述接触,当小球接触时会发生弹性变形,变形的程度与各自的弹性模量$E$有关,总的变形为$x$。当变形发生时,每个小球都会受到一个弹性力:
$R$表示合成相对曲率,$E^*$表示合成弹性模量,它们都可以通过两个小球的参数计算出来;$\sigma$表示偏心系数,当$\sigma=1$的时候为圆接触,$x$为总的变形量。
接触力模型中的第二项表示损耗力,或是阻尼力。碰撞的发生往往伴随着能量的损耗,单纯的弹性力无法表示这一点,因此引入Hunt-Crossley耗散力:
$c^{*}$表示等效耗散系数,而$\dot{x}$表现出耗散力的阻尼特性。刚度力和耗散力都垂直接触面。
接触力模型中的最后一项表示摩擦力,方向平行接触面:
$\mu(v)$表示等效摩擦因数,是关于相对运动速度的函数。
在使用上述的Hunt-Crossley模型来计算地反力时,地面的刚度认为无穷大,则相对弹性变形$x$可以通过接触小球圆心相对地面的距离计算得到,即:
综合模型
综上所述,肌骨模型的动力学可以统一表示为:
定义状态变量:
在定义$u$为16块肌肉的控制量(excitations),上面的动力学方程可表示为:
肌骨模型的仿真应用
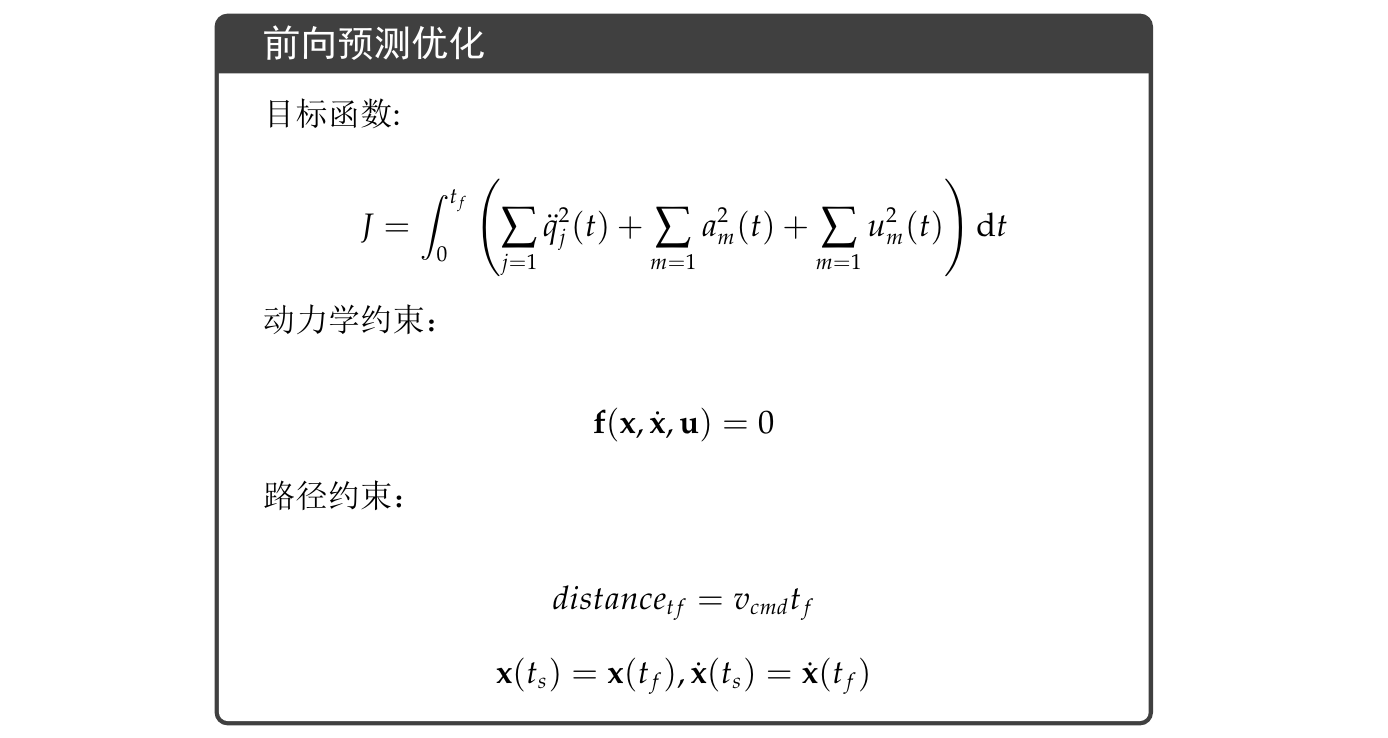
前向仿真
逆向分析
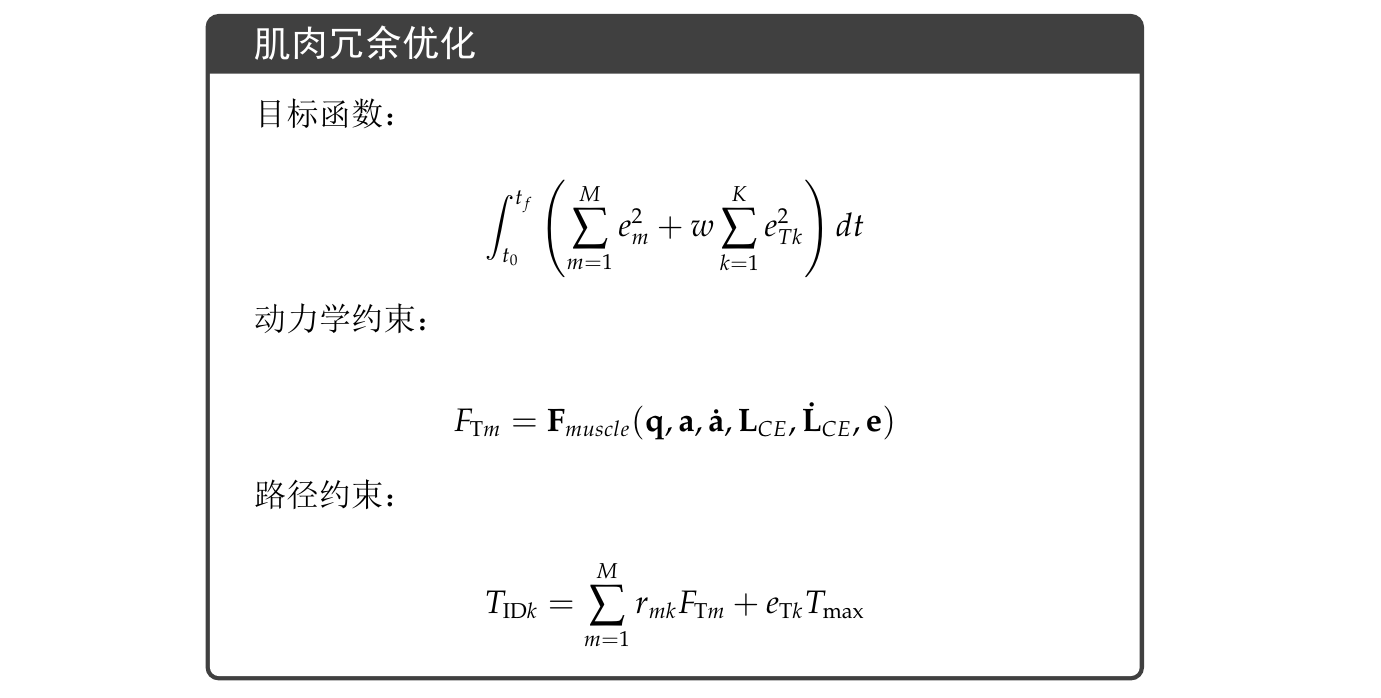
逆向分析是指,在已有运动学、地反力数据后,根据实验数据推断出产生相应运动的肌肉活动,也就是OpenSim中的CMC。由于肌肉之间存在和比较严重的耦合问题,多块肌肉连接同一个关节,同一块肌肉连接着不同关节,因此逆向分析最重要的是解决肌肉冗余 - Solving the Muscle Redundancy Problem。
在这个问题中,已有运动学数据$\mathbf{q}_k$和地反力$\mathbf{F}_{\mathbf{C}k}$序列,$k=1, \ldots, K$表示离散时间。我们先计算逆动力学得到关节力矩$T_{\mathbf{ID}k}$,关节力矩应当等于有肌肉收缩的等效力矩:
$m$表示肌肉序号,$r$表示肌肉对关节等效力矩。有时候关节力矩和肌肉里橘无法严格相等,因此我们添加了公式中的最后一项来表示力矩的残差,而$e_{\mathrm{T} k}$表示残差系数,在后面我们会设计优化目标是残差力尽可能的小。
由此建立逆向分析的优化框架: